Robotic Hands at Intel Research

Robotic Hands at Intel Research
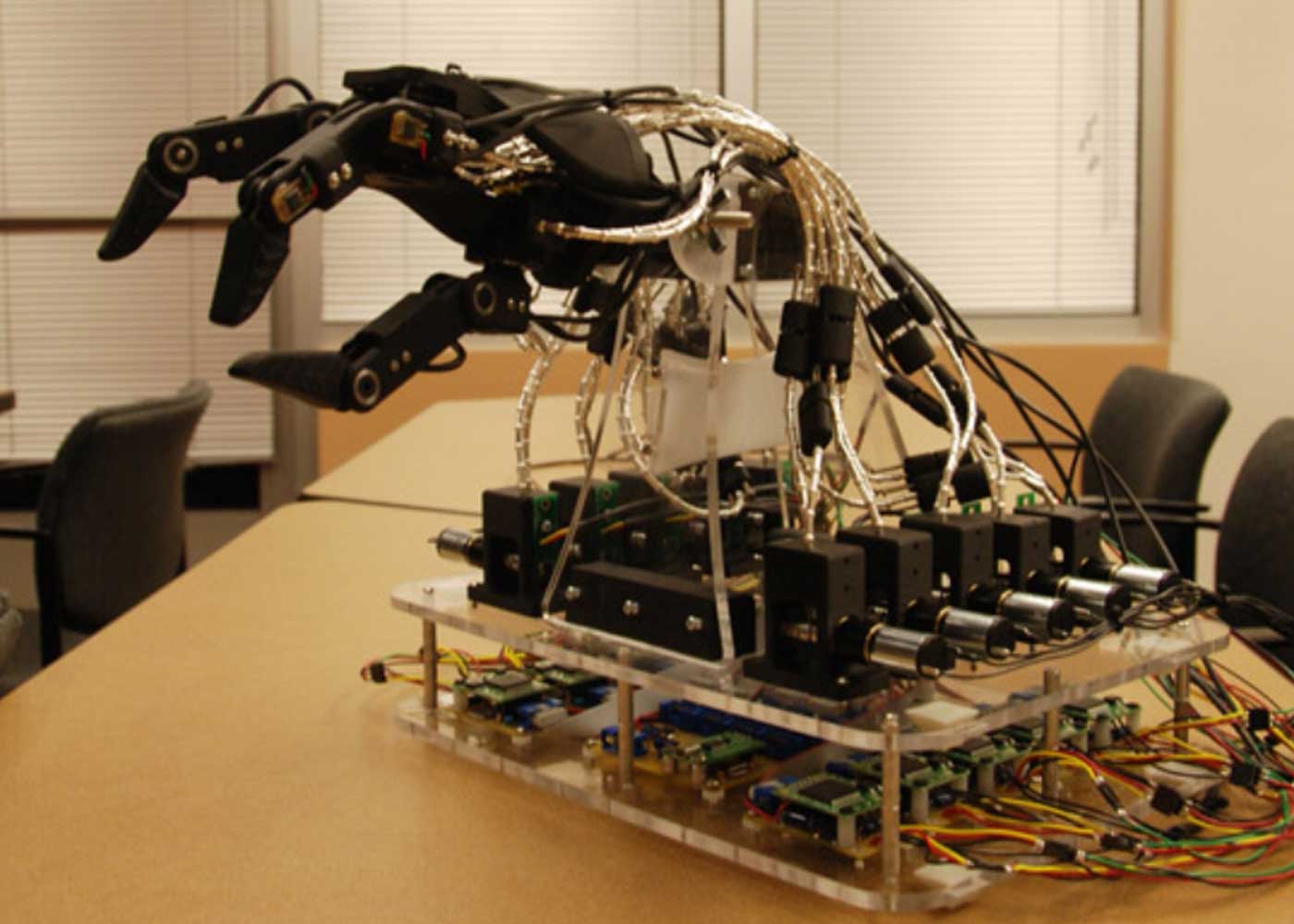
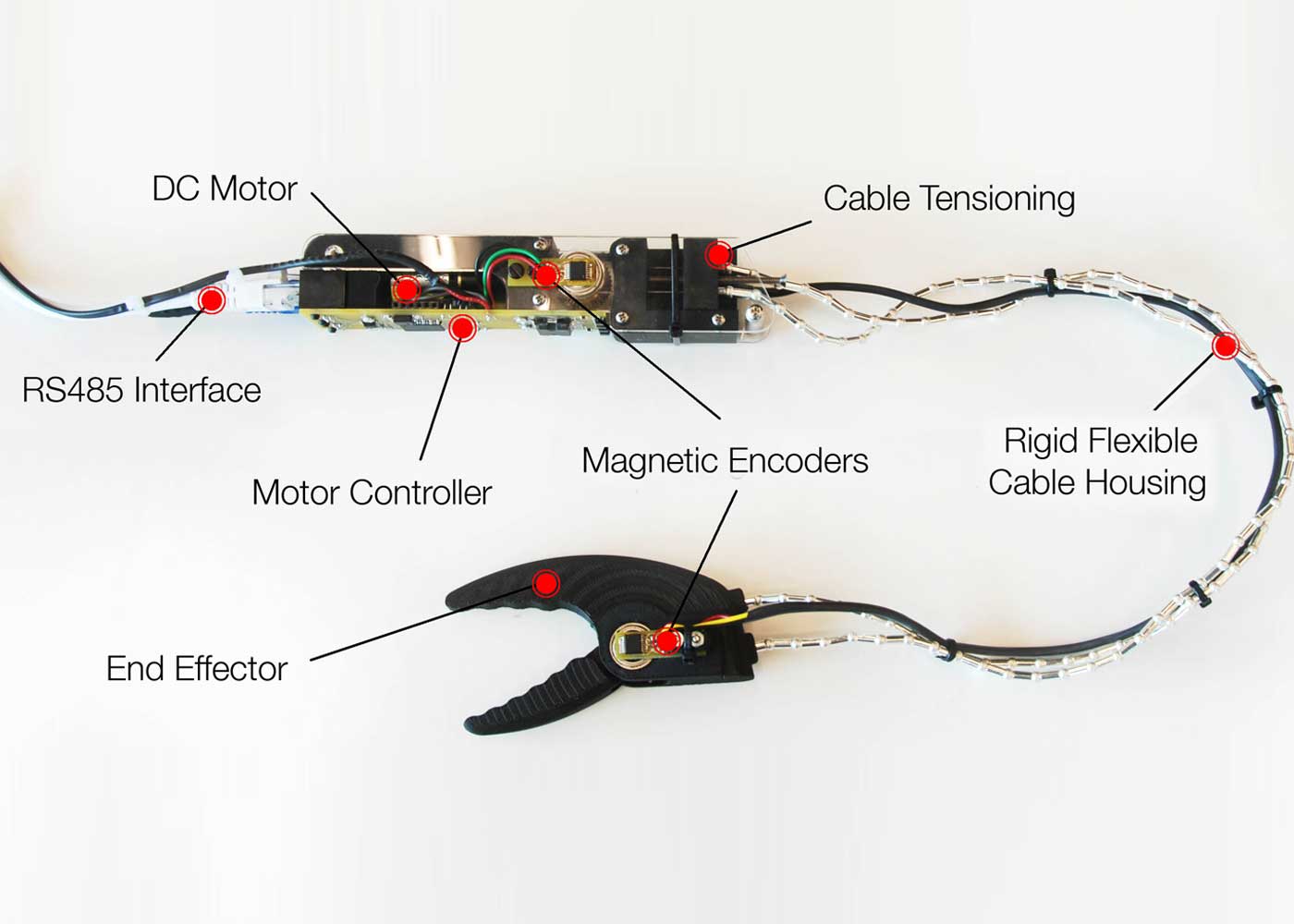
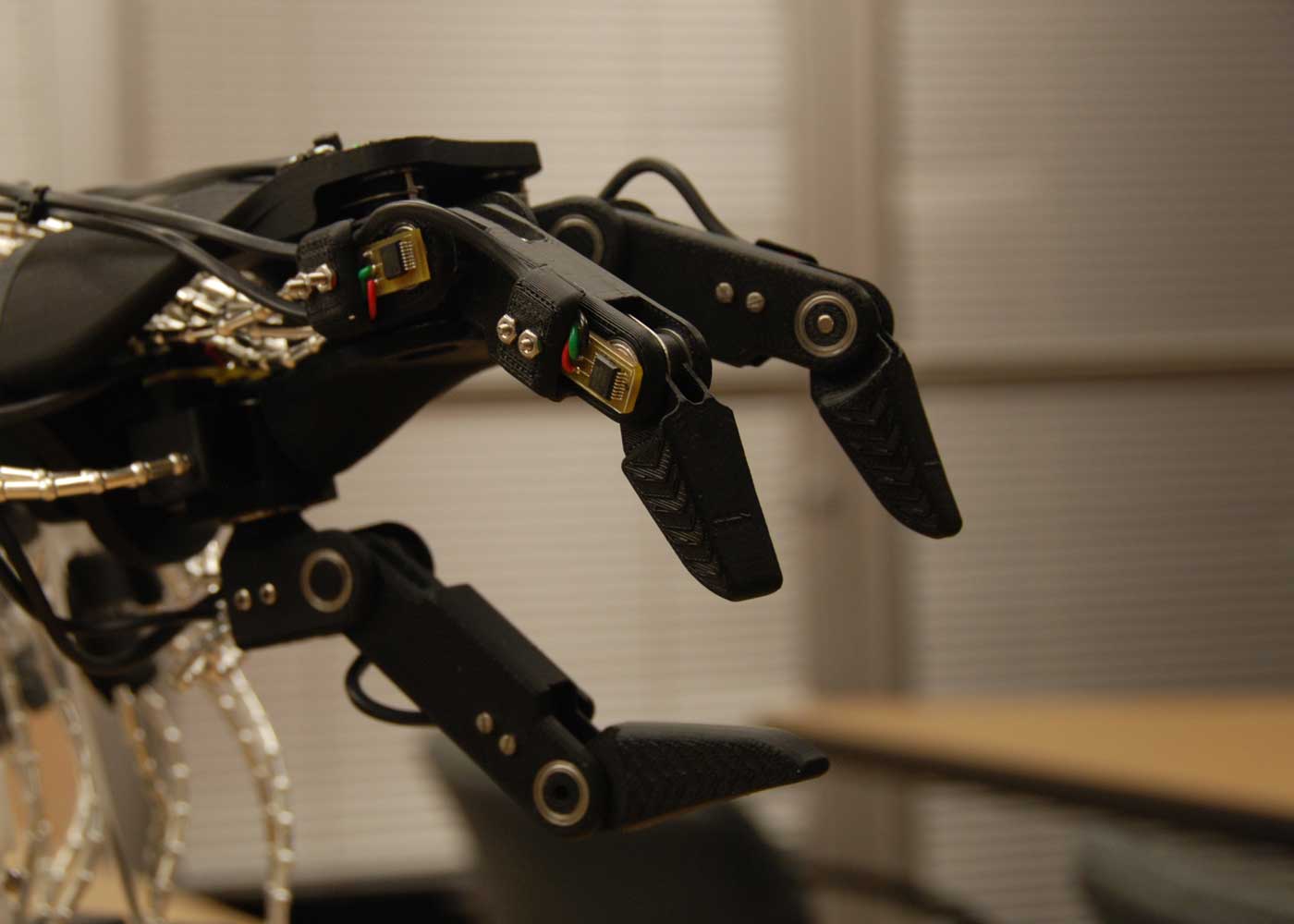
This small robotic system is a prototype for a prosthetic hand. The design uses a special type of control system that is able to sense force using multiple sensors and a cable drive. Cables are lossy and have sticktion, friction, and many undesirable qualities, but they also enable movement at a distance. This design uses magnetic sensors at the motor and end-effector. Multiple sensors enable a model to estimate the force applied to the system which can be used for control. For this reason, each DOF or Degree of Freedom has not just position control, but torque control. By looking at the difference between sensors, the hand can sense forces, perhaps when grasping a delicate egg.
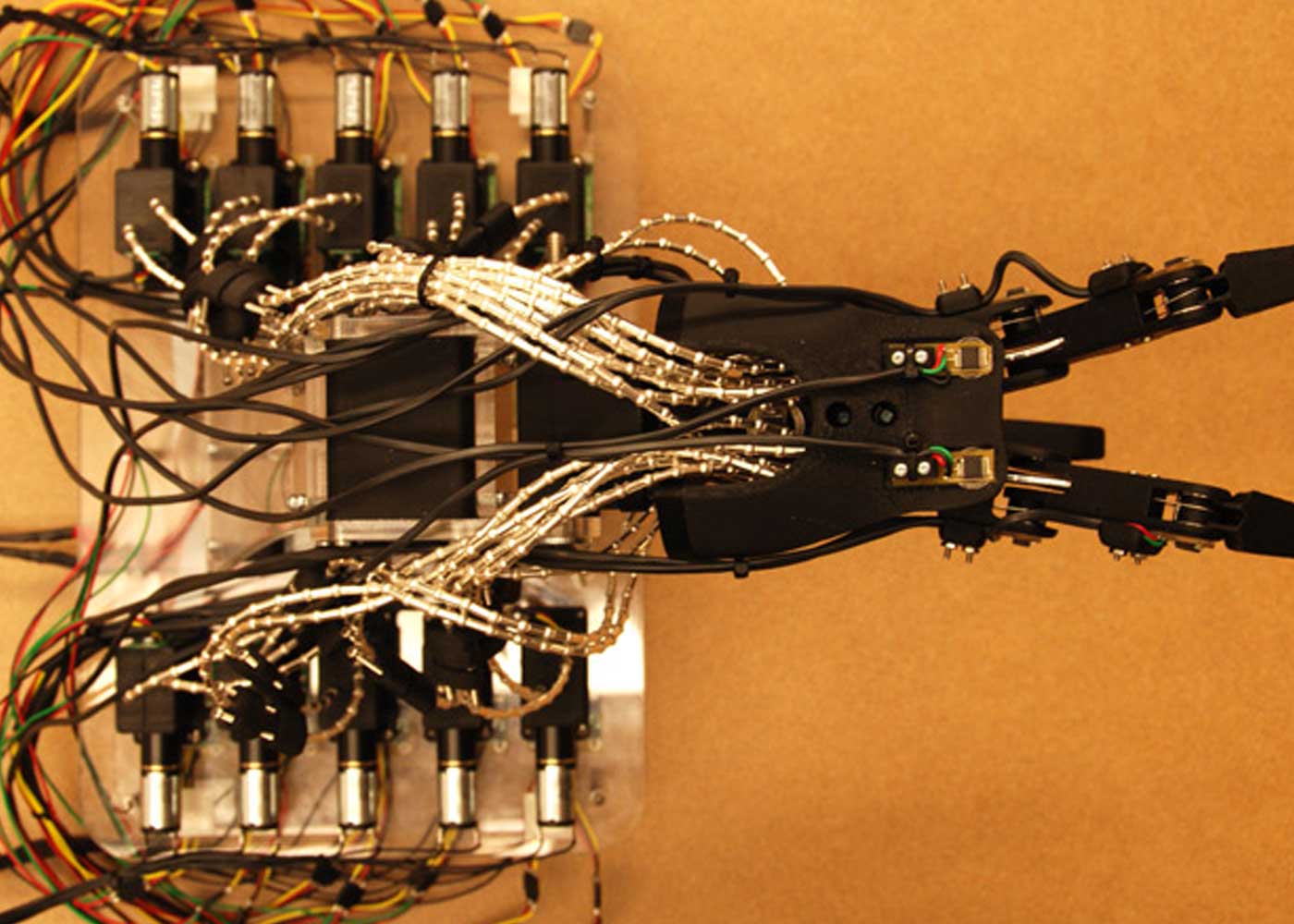
Each joint has a separate microcontroller and H-bridge. Since the motor and hand are separated by a cable link, arbitrary hand form factors can emerge. Ideally, such a system could be used to make prosthetics that are printed for a specific person. This small hand is the first prototype to validate a specific type of control system. Tensioning each joint was critical and accomplished through a small screw-based device. Teflon tubing and small segments of metal enabled each joint to actuate at a distance, very similar to a bike brake cable, but in a pull-pull configuration. The hand was designed in SolidWorks and manufactured using FDM 3D printing technology.